Chapter 16: Applications and Case Studies
Jake Gunther
2020/20/2
Background
Background
- Illustrate trade-offs and issues arising in real applications
- How to incorporate domain knowledge
- Representation issues
- “Applications of reinforcement learning are still far from routine and typically require as much art as science.”
TD-Gammon
TD-Gammon
- Gerald Tesauro (1992-2002)
- Program: TD-Gammon
- Little knowledge of the game
- Played nearly as well as world champs
- Straightforward combination of TD(\(\lambda\)) and ANN for \(\hat{v}\)
Backgammon
- Complete knowledge of state is available
- Episodic
- Game tree has branching factor of 400 (much larger than Chess)
- Huge number of states
Setup
- Want \(\hat{v}(s,\mathbf{w})\) to estimate the probability of winning starting from state \(s\)
- Rewards are zero for all time steps except those on which a game is won (\(R_t=1\))
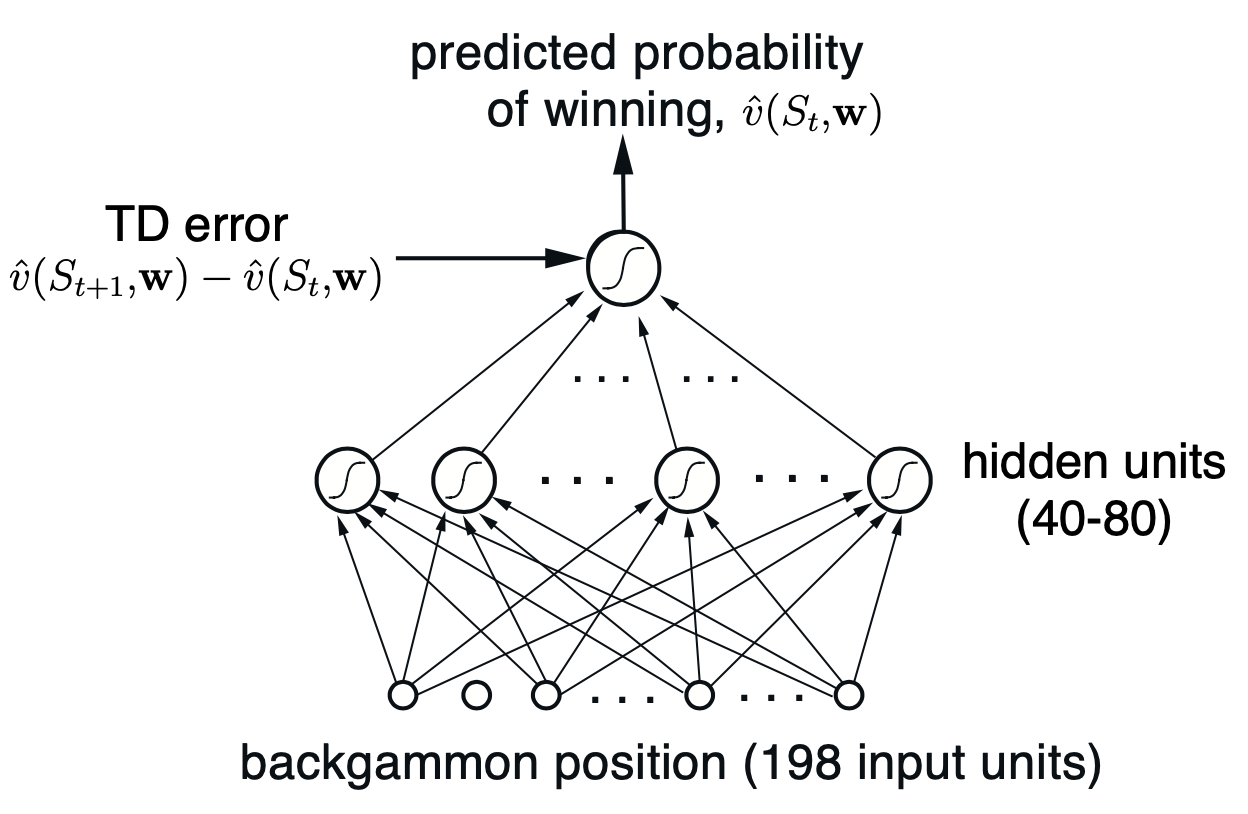
Setup
Sigmoid activation function in ANN
Board representation (pg. 423) - like a one-hot encoding
Reward is zero except for a win
Learning
- Semi-gradient form of TD(\(\lambda\))
- Accumulating eligibility traces
- Play against itself (self-play)
- Used afterstates
- Initial games took 100,000 moves
- Performance improved rapidly
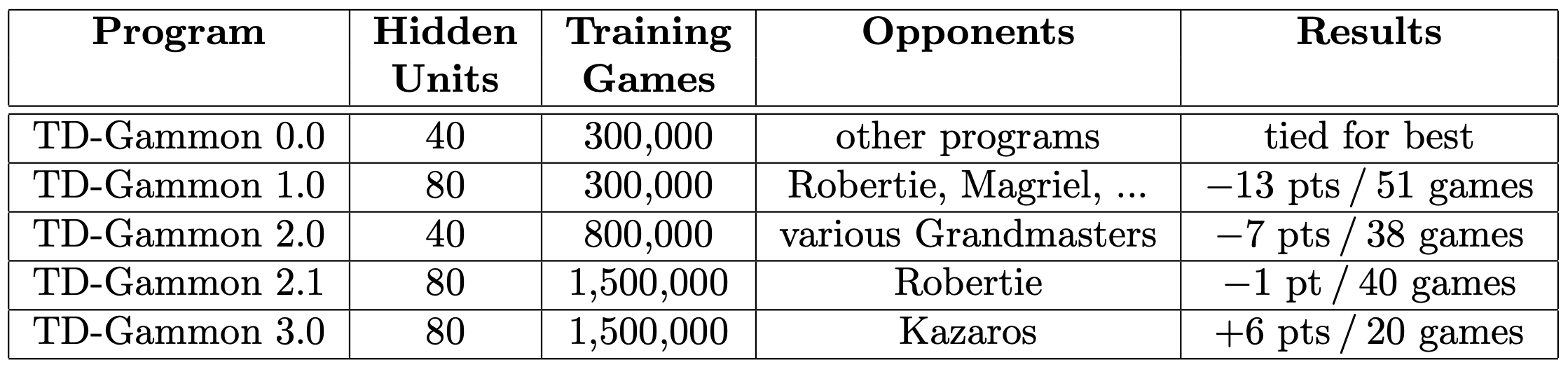
Performance
- After 300,000 games (episodes) TD-Gammon 0.0 played as well as any backgammon software, including Neurogammon also written by Tesauro which won a world tournament in 1989
- TD-Gammon 0.0 had essentially no knowledge of the game
TD-Gammon 1.0
- TG-Gammon 0.0 + backgammon features
- Gave human experts serious competition
TD-Gammon 2.x
- 2.0 used 40 hidden units
- 2.1 used 80 hidden units
- Look ahead search
TD-Gammon 3.x
- 3.0, 3.1 used 160 hidden units
- More advanced look ahead search
- More episodes
- Changed the way human experts play
Summary
Other Games
Other Games
- Samuel’s Checkers Players
- Watson’s Daily-Double Wagering (Jeopardy!) - Adaptation of TD-Gammon system
- Optimizing memory control
Human Level Video Game Play
Human Level Video Game Play
- How to represent and store value functions and/or policies?
- Features
- Readily accessible
- Convey information necessary for skilled performance
- Often hand crafted based on human knowledge and intuition
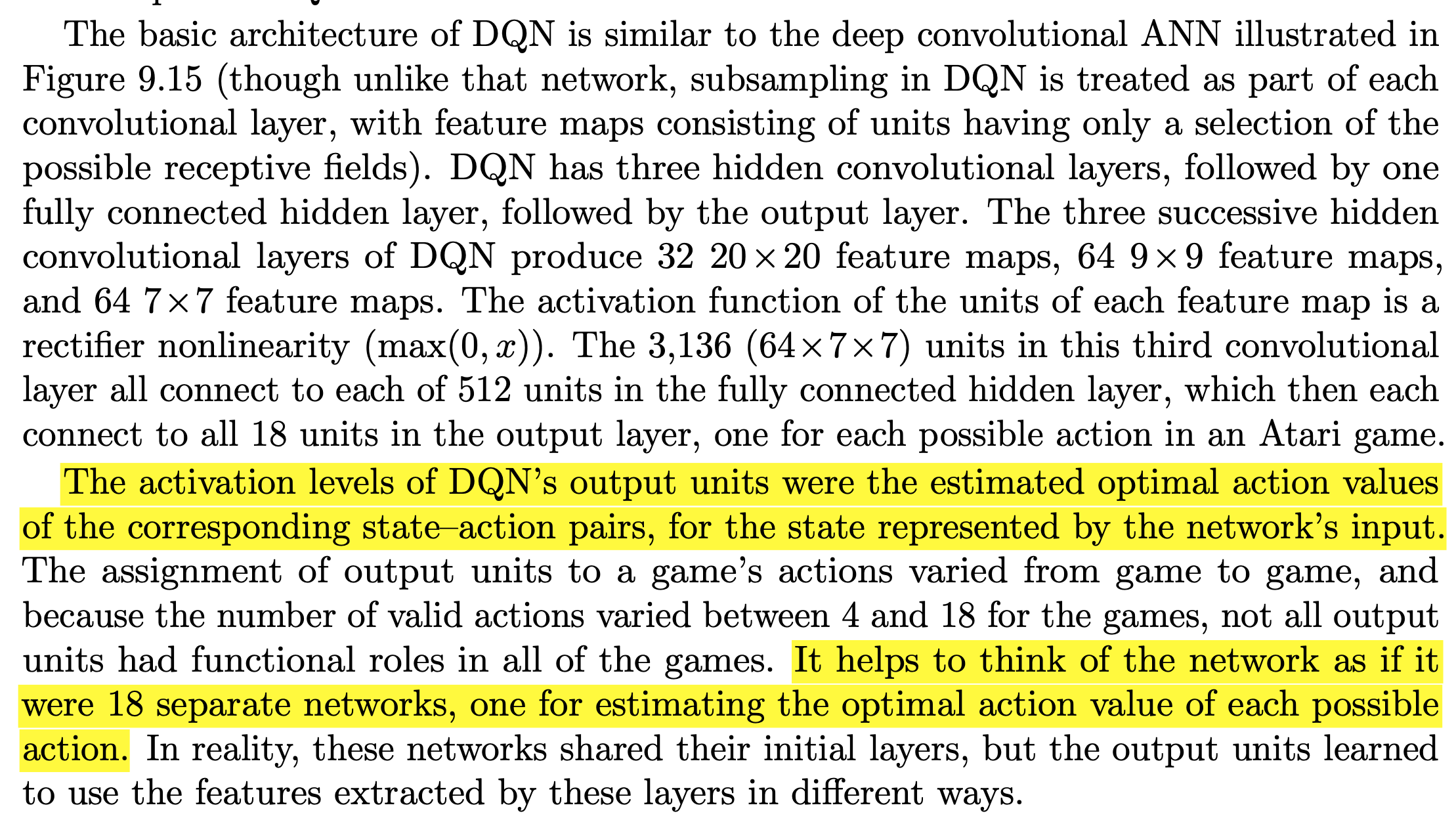
Video Game Play
- ANN/DNN can learn task-relevant features
- Team at Google DeepMind developed deep Q-network (DQN)
- DQN = deep CNN + Q-learning
- Don’t need problem-specific feature sets
- Learned to play 49 different Atari 2600 video games
- Learned different policy for each game
- Same RL parameters and deep CNN architecture
- Achieved super-human performance on many games
Video Game Play
- ANN function approximation of action-value function
- Semi-gradient form of Q-learning
- Used experience replay
- Off-policy, \(\varepsilon\)-greedy policy
- 50 million frames = 38 days of experience
- No game-specific modifications to RL + ANN architecture
Policy ANN
Reward
- +1 when score increased
- -1 when score descrased
- 0 otherwise
Features
- Stack of four video frames
DQN Algorithm

- Used mini-batch updates for the ANN (accumulate gradient over small batches before updating)
- RMSProp (use running average of gradients for weight updates … similar to eligibility traces)
Experience Replay
- Store \((S_t, A_t, R_{t+1}, S_{t+1})\) in replay memory
- At each time step (mini-batch) sample uniformly from replay memory
- Off-policy algorithm need not be applied along connected trajectories
- Data efficiency: Use each sample more than once
- Decorrelation: Breaks correlation among weight updates
- Stability: Experience (actions chosen) not dependent on current weights
DQN Modifications
- \(\gamma \max_a \hat{q}(S_{t+1},a,\mathbf{w}_t)\) target in DQN depends on the weights
- Can lead to oscillations and/or divergence
- Solution: Fix \(\mathbf{w}_t\) for some number, \(C\), of updates

DQN Modifications (continued)
- Clip:
\[ \begin{gather} \delta_t = R_{t+1} + \gamma \max_a \tilde{q}(S_{t+1},a,\mathbf{w}) - \hat{q}(S_t,A_t,\mathbf{w}_t) \\ \mathbf{w}_{t+1} = \mathbf{w}_t + \alpha \text{clip}(\delta_t) \nabla \hat{q}(S_t,A_t,\mathbf{w}) \\ \text{clip}(\delta_t) = \begin{cases} +1, & \delta_t > +1 \\ \delta_t, & -1 \leq \delta_t \leq +1, \\ -1, & \delta_t < -1\end{cases} \end{gather} \]
DQN Summary
- Deep convolutional NN avoids the need for hand crafted features (features can be learned)
- Modifications led to significant benefits
- Stacking frames to create Markovity
- Experience replay
- Freezing the learning target for \(C\) steps
- Clipping the error
- Mini-batches and gradient filtering
- Deep (not shallow) NN
Mastering the Game of Go
RL for Go
- Deep CNN to approximate value functions
- Supervised learning
- Monte Carlo tree search (MCTS)
- RL
- Self-play
Monte Carlo Tree Search (8.11)
- Effective for single-agent sequential decision problems
- Needs simple environment model for fast multistep simulation
- Used to select actions in a given state
MCTS
- Simulate many trajectories from current state to terminal state
- Extend trajectories that received high evaluations from earlier simulations
- Approximate value/policy functions not needed
- Trajectories generated using simple “rollout” policy
- MC estimate of \(q(s,a)\) for a small tree rooted at current state
MCTS
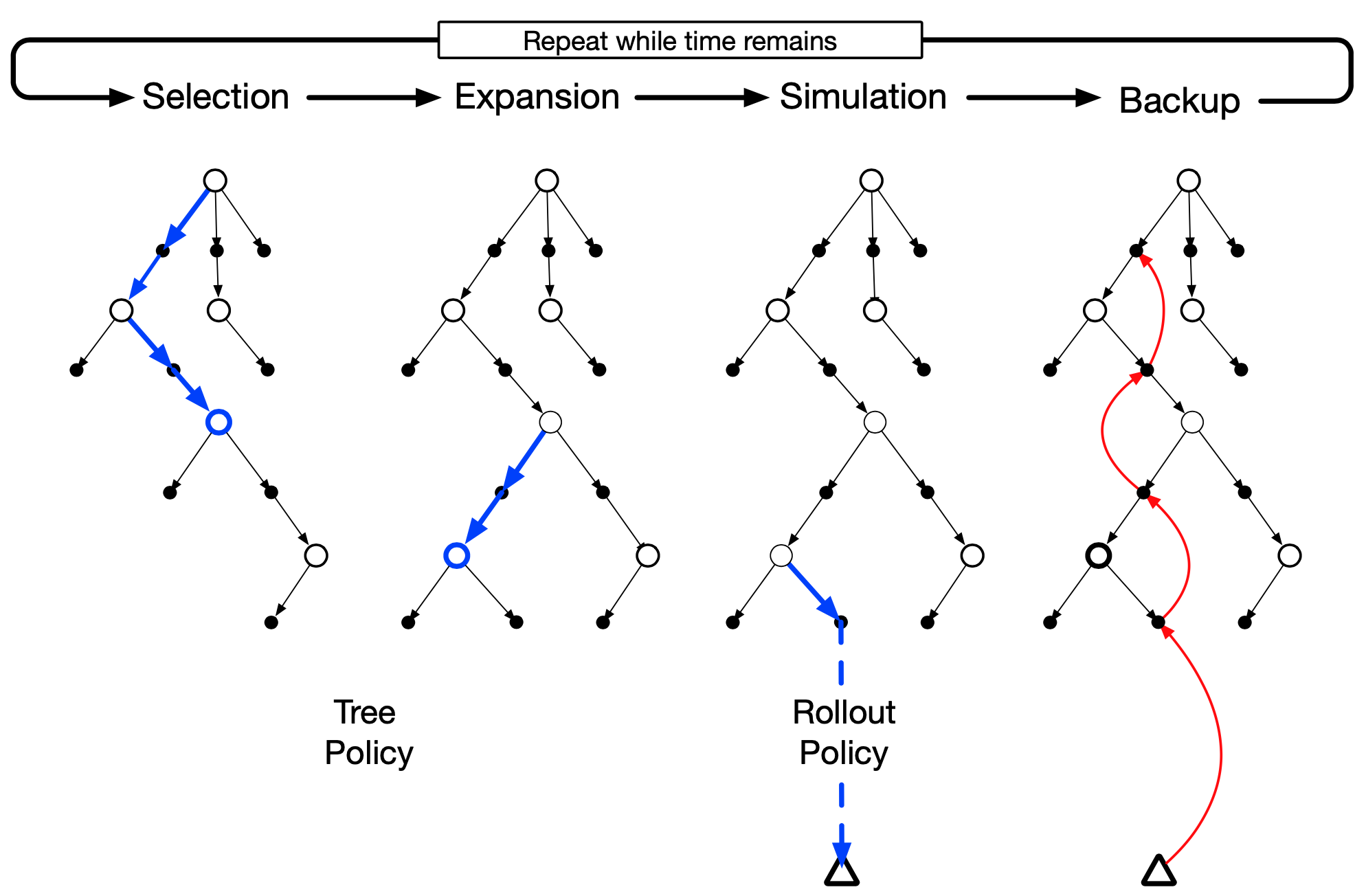
MCTS
- Outside tree: Rollout policy used for action selection
- Inside tree: Tree policy used for action selection
- Tree policy is \(\varepsilon\)-greedy on estimated \(q(s,a)\) function
- MCTS iteration
- Select leaf node
- Expand by adding child nodes (exploration)
- Simulate to terminal state using rollout policy
- Use backed up return to update/initialize \(q(s, a)\) at tree nodes
MCTS Summary
- Final action based on \(q\) or frequency of selection
- Discard (prune) unneeded portion of tree
- Grow a lookup table to store partial (not global table) \(q(s, a)\) for high-yielding sample trajectories
- No need for global \(q(s, a)\) function approximation
- Uses past experience to guide exploration
Rollout Algorithms (8.10): Overview
- Based on MC control applied to simulated trajectories rooted at current state
- Actions selected using “rollout” policy
- Returns averaged over many simulated trajectories
- Action selected based on max estimated value
Rollout Algorithms: Details
- MC estimate of \(q(s, a)\) only for current state \(s\) and for “rollout” policy
- Makes immediate use of \(q\) and then discards it
- Do not sample outcomes for every state-action pair
- No function approximation
Rollout Algorithms: Justification
- It is an explicit application of policy improvement
- Estimate \(q(s, a)\) for each \(a \in \mathcal{A}(s)\) and select the best action (greedy)
- This gives a better policy than the rollout policy
Alpha Go Zero
Alpha Go Zero
- Used no human data or guidance beyond basic rules of the game
- Learned from self-play RL
- Inputs/states were stone placements on game board
- Policy iteration: Policy eval + policy improvement
- (Read the book)
Alpha Go Zero